Das Projekt DRIVE wurde mit dem Ziel gestartet, die Idee des
autonomen Fahrens auf ein kleines Auto zu übertragen. Das Auto selbst muss dafür mit
entsprechenden Sensoren und Hardware ausgestattet sein, um die Umgebung wahrnehmen
und auf verschiedene Situationen entsprechend reagieren zu können.
Durch ein neuronales Netz werden diese Entscheidungen getroffen, welches zuvor
mit umfangreichen Daten der Strecke trainiert wird.
Diese Bestandteile des Projekts werden in den folgenden Abschnitten
genauer vorgestellt.
Über das Projekt DRIVE
Das Auto
Im Rahmen der Projektarbeit wurden etliche Veränderungen am Auto durchgeführt, die Auswirkungen auf die Fahrweise hatten und zu einer verbesserten optischen Darstellung geführt haben.
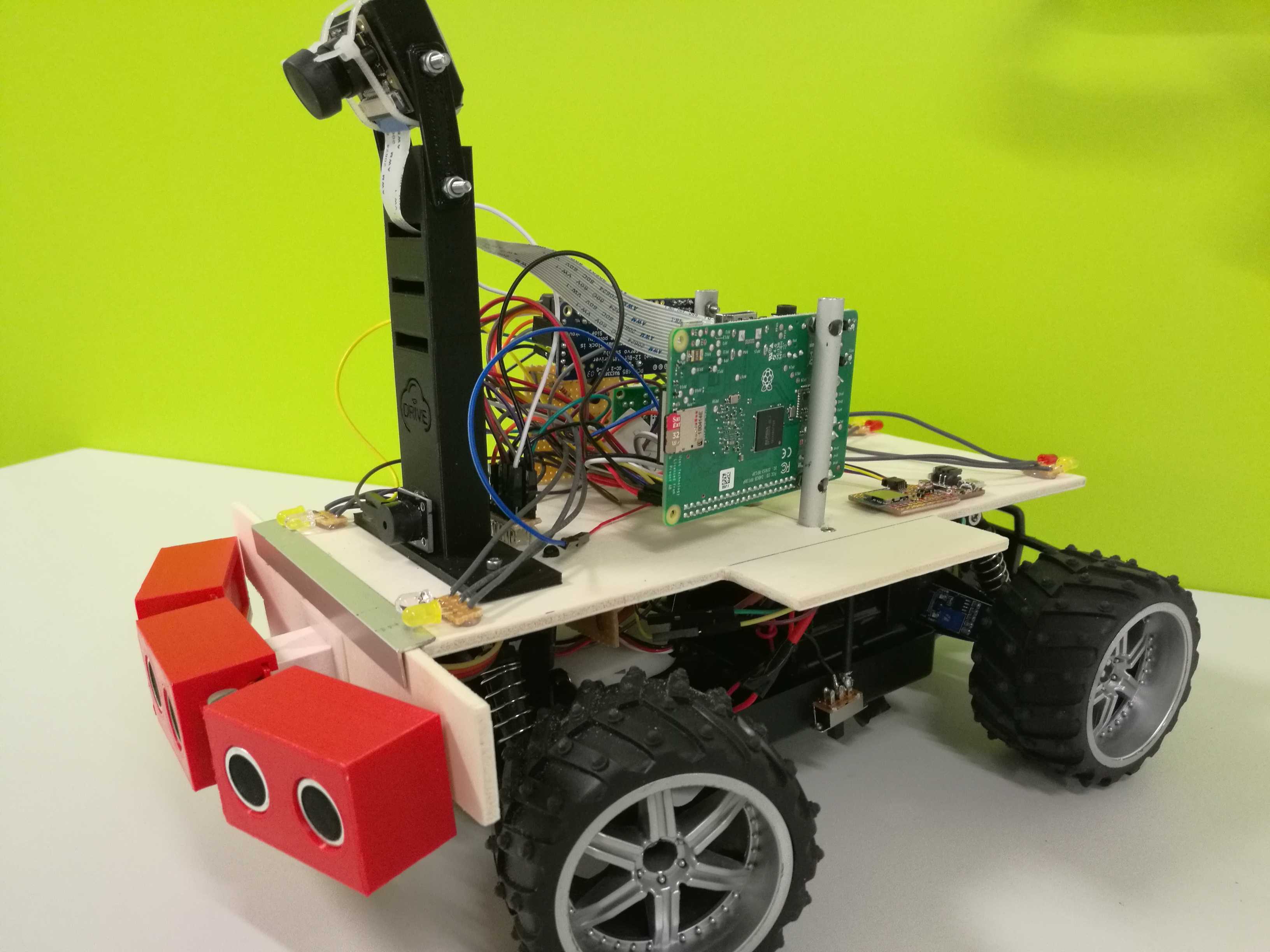
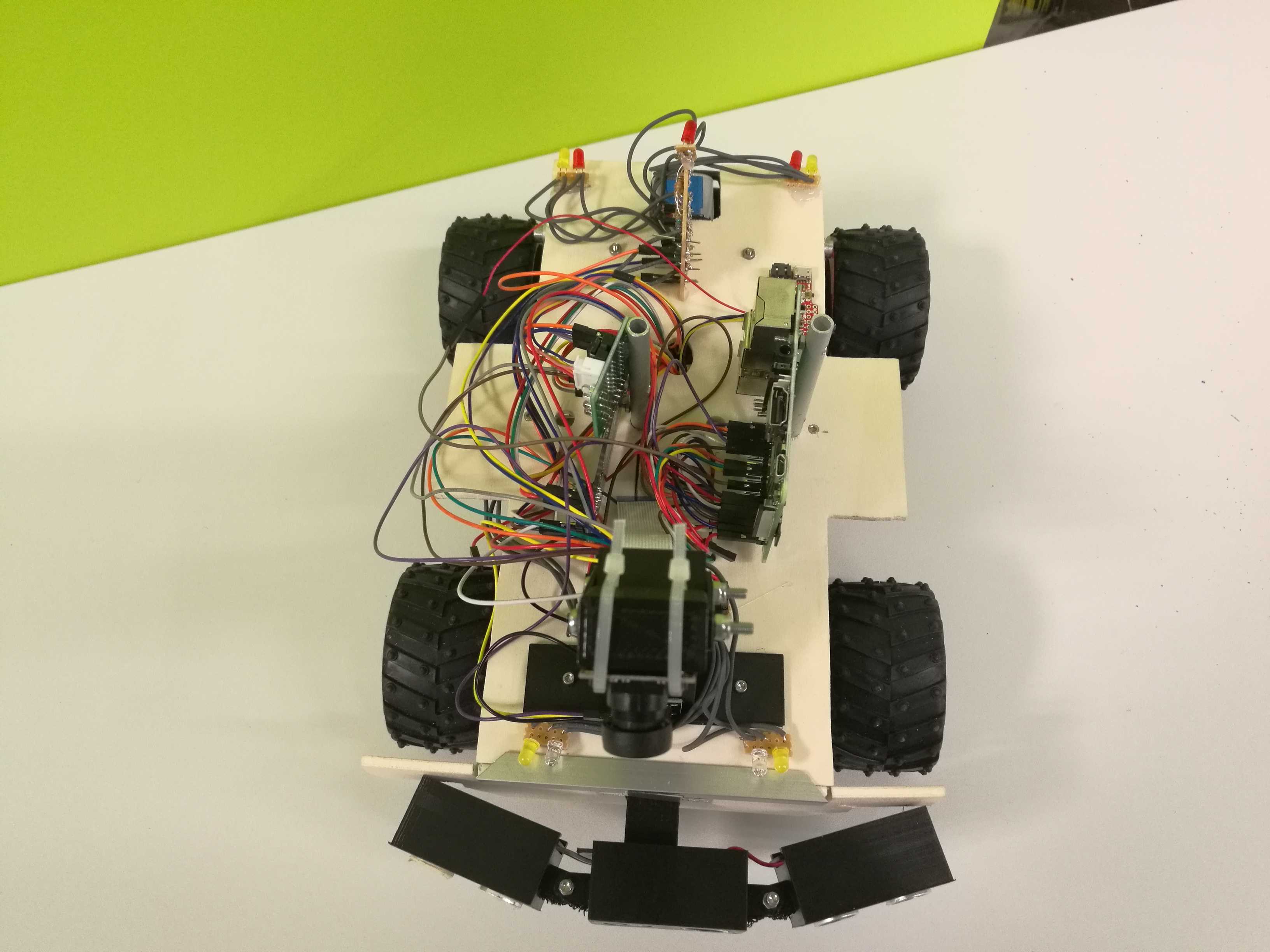
Die Basis
Das alte DRIVE-Modell basierte auf einem umgebauten RC-Car, mit einem Motor für die Hinterachse und mit der Möglichkeit zur Lenkung durch die Vorderachse. Dies hat allerdings in der ursprünglichen Fassung nicht ausgereicht und wurde durch eine selbstentworfene Lenkung ersetzt, um den Wendekreis des Fahrzeugs zu verringern. Außerdem wurde eine selbstentworfene Bremse hinzugezogen, die beim Bremsvorgang Stangen ausgefahren und gegen die Hinterreifen gepresst hat.
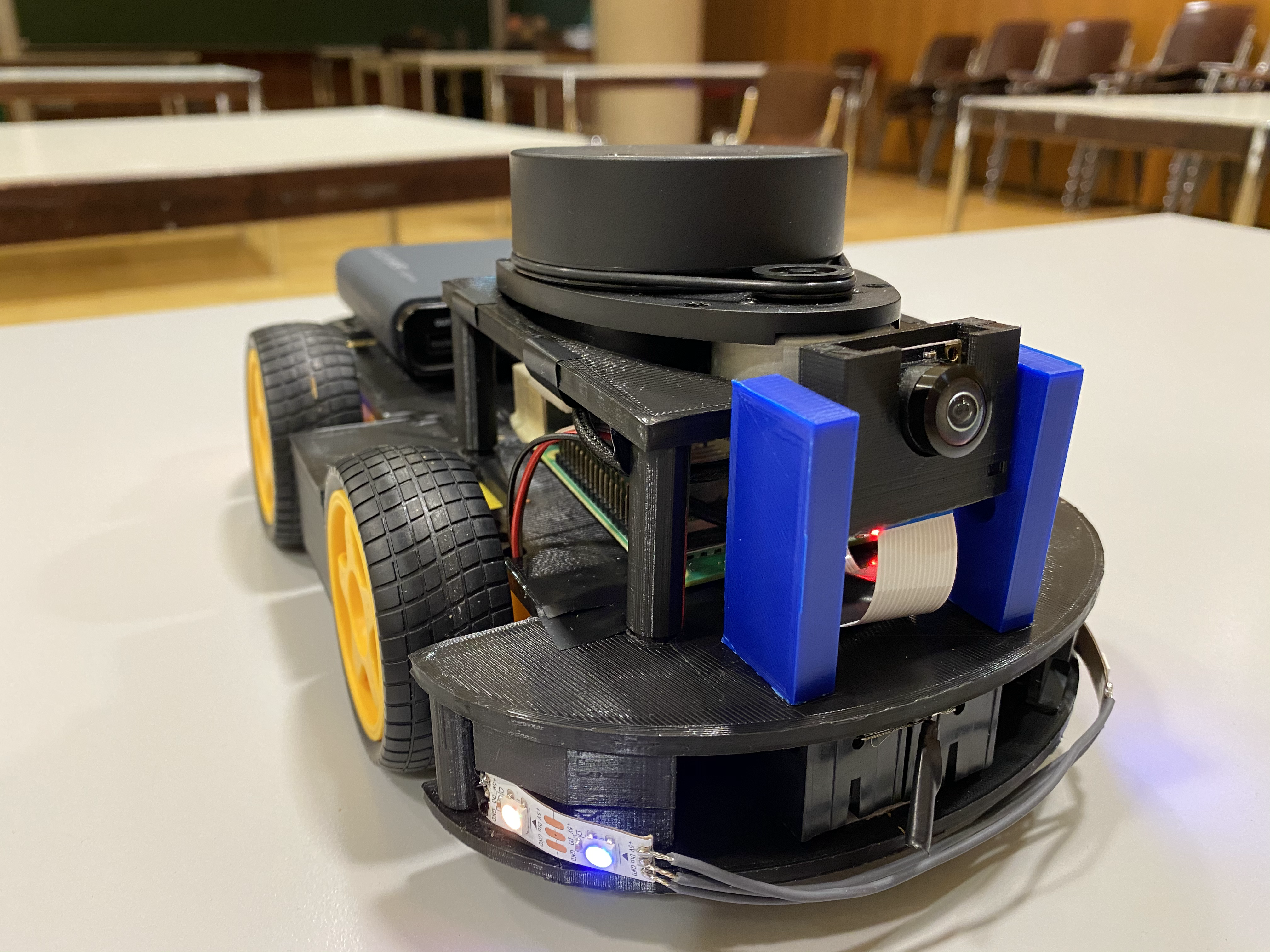
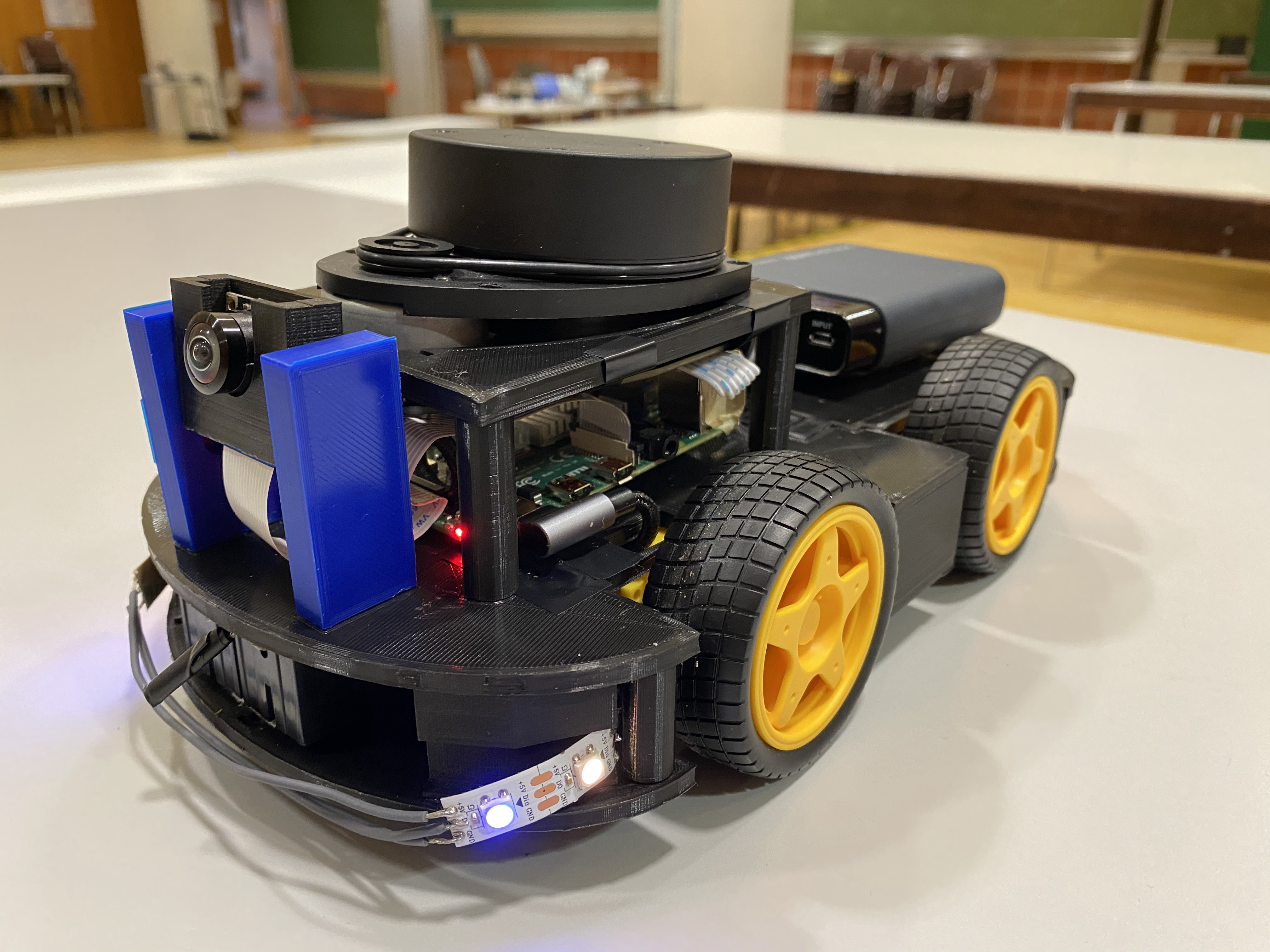
Das neue Modell basiert auf einem Robot Vehicle Kit, erweitert durch eine 3D-gedruckte Plattform, die sowohl für ein besseres Platzmanagement als auch für die Stabilisation verschiedener Sensoren (z.B. LiDAR) beigeholfen hat. Im Gegensatz zum alten Modell sind hier vier Motoren vorhanden, die den Reifen jeweils zugeordnet sind. Die vorherigen technischen Lösungen in Hinblick auf die Lenkung und Bremsung konnten allerdings nicht mehr angewandt werden, wobei durch geschickter softwarebasierter Ansteuerung der einzelnen Motoren diese Schwierigkeit behoben werden konnte.
Die Hardware
Verschiedene Sensoren, die noch Anwendung in dem älteren Modell fanden, wurden in
der neuen Version des DRIVE Autos aussortiert. Darunter fallen die
Ultraschallsensoren an der Front des Fahrzeugs, welche durch den LiDAR ersetzt
wurden. Beide Sensoren erfüllen zwar die Funktion der Hinderniserkennung,
beim LiDAR besteht jedoch die Möglichkeit 360-Grad Abtastungen durchführen zu
können.
Desweiteren wurde die selbstentworfene ATTINY-Platine verbaut, womit die Motoren und
die Beleuchtung des Autos gesteuert werden und somit den zuvor verwendeten
Arduino Servo Driver und die LED Platine verdrängt hat.
Außerdem wurde der vorher genutzte Raspberry Pi 3 Model B+ durch den Raspberry Pi
4 Model B ausgetauscht und insgesamt zwei Intel Neural Compute Stick 2 angeschlossen,
um eine höhere Performanz zu erzielen. Die Kamera selbst wurde nicht ausgewechselt,
jedoch auf eine tiefere Ebene versetzt, damit der LiDAR ungestört Abtastungen
durchführen kann.
Weitere Informationen zu der einzelnen Hardware in der aktuellen Version des
DRIVE Autos gibt es
hier zu finden.
Das neuronale Netz
Annotation
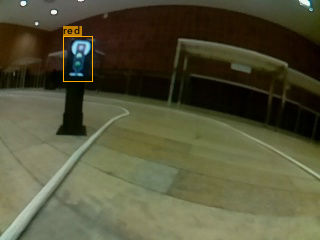
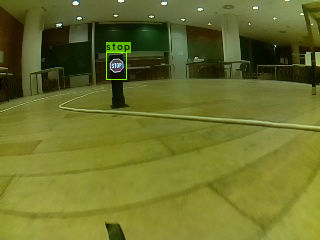
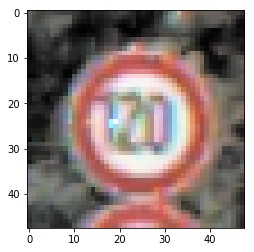
Bevor ein neuronales Netz aufgebaut werden kann, müssen zunächst umfangreiche Trainingsdaten vorliegen. Eine beliebige Strecke mit Ampeln und Stoppschildern wird also manuell befahren und aufgenommen. Anschließend werden mithilfe eines Tools die Trainingsdaten annotiert, indem Boxen um ein Verkehrsschild oder Ampel angefertigt werden.
Training
Mithilfe eines YOLOv3 Netz können die annotierten Daten trainiert werden. YOLOv3 ist ein state-of-the-art neuronales Netz zur Object Detection. Als Eingabe erhält das Netz ein Bild, woraufhin Ergebnisse für jeweils drei unterschiedliche Bildauflösungen ausgegeben werden. Für jede Bildauflösung werden verschiedene Koordinaten mit Wahrscheinlichkeiten geliefert, wo vermutet wird, dass sich an besagter Stelle im Eingabebild ein Objekt befindet und eine zusätzliche Wahrscheinlichkeit ausgegeben, um welche Klasse (z.B. Rote Ampel, Gelbe Ampel, Grüne Ampel, Stoppschild, ...) es sich handeln könnte. Aus der Ausgabe kann man nun mit einem Treshhold für die Wahrscheinlichkeiten berechnen, welche Objekte in dem Bild tatsächlich aufzufinden sind.
Verifikation
Neuronale Netze werden zunehmend in sicherheitskritischen Anwendungen eingesetzt.
Daher muss sichergestellt werden, dass sich diese korrekt verhalten. Dabei ist es
oft schwierig zu spezifizieren, was korrektes Verhalten ist, da neuronale Netze
meist für Probleme eingesetzt werden, welche sich kaum formal spezifizieren lassen.
So verhält sich ein Klassifikator, der Hunde auf Bildern erkennen soll, korrekt,
wenn er genau dan einen Hund erkennt, wenn auf dem Bild ein Hund ist. Die Klasse
aller Bilder, auf denen Hunde zu erkennen sind, ist dabei jedoch nicht formal
beschreibbar. Es können lediglich Beispiele für Bilder innerhalb dieser Menge
angegeben werden.
Die Idee der "adversarial examples" beruht auf der Annahme, dass wenn man ein Bild
nur leicht verändert, immer noch das selbe Ergebnis produzieren sollte. Bei
Änderung weniger Pixel wird aus einem Hund kein Haus. Daher kann die Sicherheit
eines Ergebnisses untersucht werden, indem leicht veränderte Versionen der Eingabe
betrachtet werden. Ein "adversarial example" ist dabei eine Eingabe, die nah an der
originalen Eingabe ist, jedoch unterscheided sich das Ergebnis des neuronalen Netzes
stark. Es gibt verschiedenste Ansätze, um solche "adversarial examples" zu finden.
Im Rahmen unseres Projektes haben wir uns mit einigen dieser beschäftigt und diese
auf unsere Objekterkennung angewandt.
Fahrtnetz
Das Fahrtnetz erfüllt die Funktion des Autopiloten und ist die Komponente des Fahrzeugs, die das autonome Fahren realisiert. Mithilfe des Fahrtnetzes soll das Auto eine beliebige, durch Seil abgegrenzte Strecke, autonom befahren können, ohne über die Fahrbahnbegrenzungen zu geraten. Hierbei liefert das neuronale Netz wertvolle für die Beschleunigung und Lenkung des Fahrzeuges, basierend auf den aktuellen Bilddaten der Frontkamera. Als Modell wurde für das Fahrtnetz ein Convolutional Neural Network gewählt, welches auf aufgenommenen Daten unterschiedlicher Strecken trainiert und validiert wurde.
Die Ortung
Bluetooth 5.1 Direction Finding
Vor Bluetooth 5.1 konnten Objekte anhand der Signalstärke (RSSI) lokalisiert werden,
wobei diese Lokalisierung nicht besonders akurat war. Mit der Bluetooth 5.1
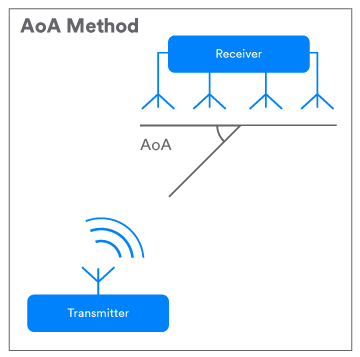
Direction Finding Technologie ist es nun möglich, Objekte mit Angle of Arrival
(AoA) und Angle of Departure (AoD) orten zu können. Beim Angle of Arrival ist
das zu lokalisierende Objekt der Transmitter und entsendet ein Signal, welches dann von
einem Antennen Array empfangen wird. Anschließend kann der Eintrittswinkel des Signal
relativ zu diesem Antennen Array berechnet werden.
Angle of Departure funktioniert ähnlich, das Objekt ist aber in diesem Fall der Receiver
des Signals.
Im Rahmen des Projektes wurde der Ansatz des Angle of Arrival
verfolgt. Dazu wurden drei Antennen Arrays im Raum positioniert, die dann die
Signale des Senders empfangen können. Die berechneten Richtungsangaben überschneiden
sich im Raum, wodurch ein Dreieck entsteht und im Mittelpunkt das zu lokalisierende
Objekt vermutet wird.
SLAM
SLAM (Simultaneous Localization and Mapping) ist ein Verfahren zur Ortung von Robotern.
Hierbei werden kontinuierliche Schätzungen zur eigenen
Position getroffen und gleichzeitig eine Karte der Umgebung angefertigt.
Die Schwierigkeit darin besteht, dass für die Lokalisierung der Position eine Karte
benötigt wird und für die Karte wiederum die Position wichtig ist.
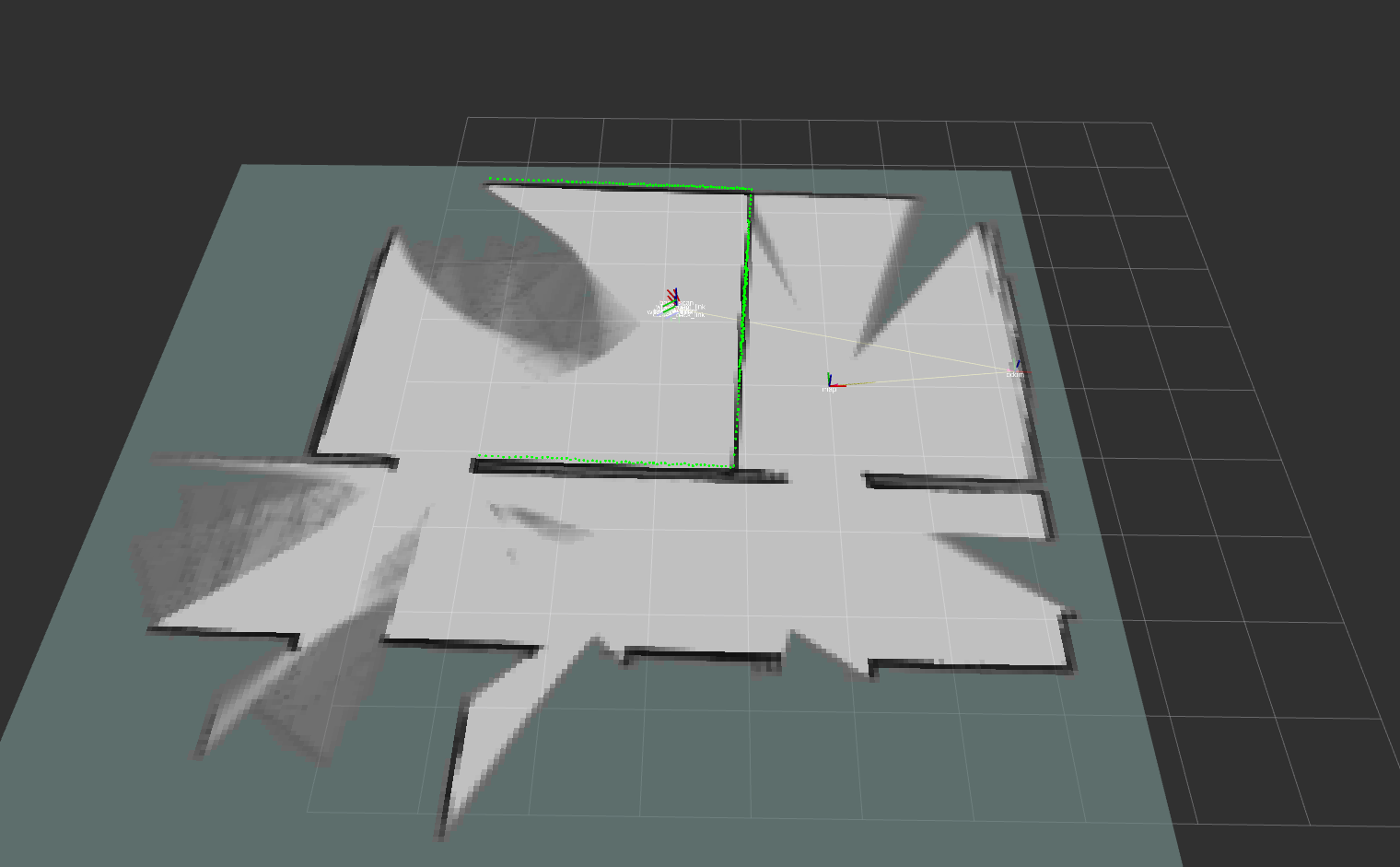
Realisiert werden kann SLAM, indem die Position des Autos durch Bluetooth 5.1 Direction
Finding ermittelt wird und die Karte innerhalb der Gazebo Simulation mithilfe vom LiDAR
generiert werden kann.
Die Simulation
Der aktuelle Simulator
Um genügend Daten für das neuronale Netz zu erzeugen, wurde ein
Donkey Car Simulator weiterentwickelt. Dadurch hat man nun die Möglichkeit, Strecken
unbegrenzt lange befahren zu können und somit über Stunden Daten zu generieren. Außerdem
können Objekte, wie zum Beispiel Straßenschilder und Ampeln, in die Simulation eingefügt
werden.
Darüber hinaus können Daten, die in der Realität aufgenommen wurden, in den Simulator
eingelesen werden. Damit wird ermöglicht, eine reale Strecke im Simulator zu trainieren,
wodurch nicht erforderlich ist, die Strecke mit dem Auto manuell zu befahren.
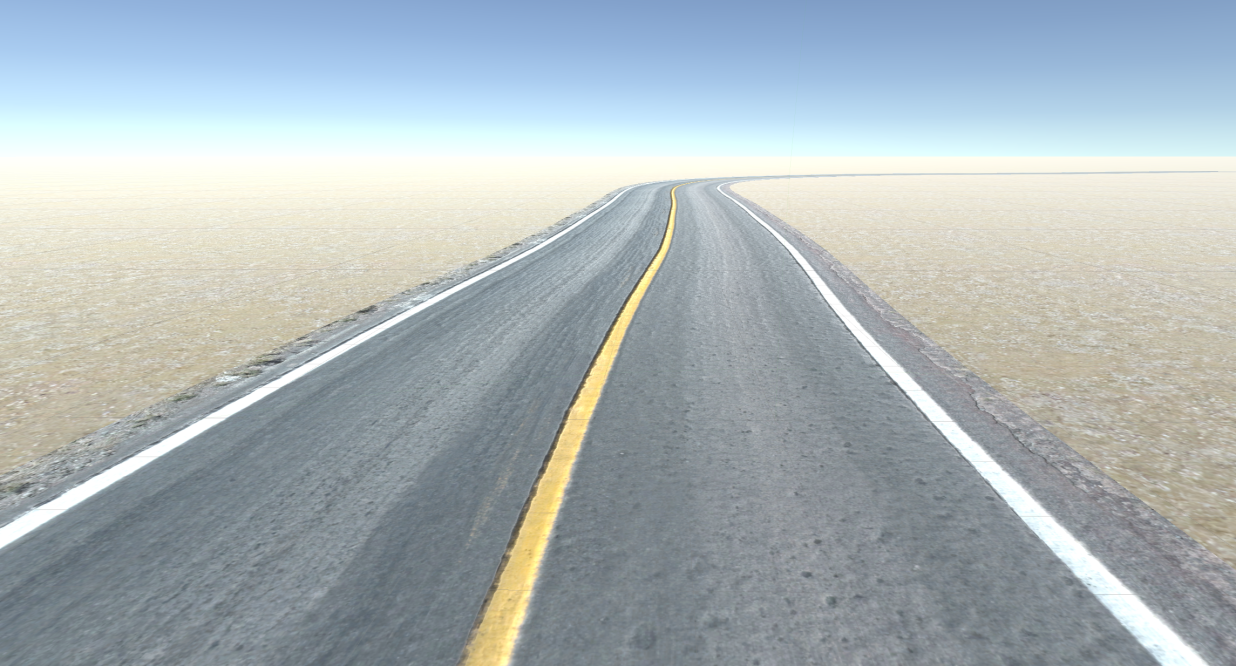
Es muss allerdings nicht unbedingt eine Strecke vorhanden sein, da mithilfe des
digitalen Autos auch Straßen generiert werden können.

System der Streckengenerierung
Aktuell wird ein System zur Generierung von nahezu beliebig großen Straßennetzen
entwickelt, die mit ein oder mehreren Fahrzeugen befahren werden können. Dadurch können
Trainingsdaten nicht nur deutlich schneller erstellt werden, sondern auch das
Training mit Kreuzungen mit und ohne Ampeln möglich sein.
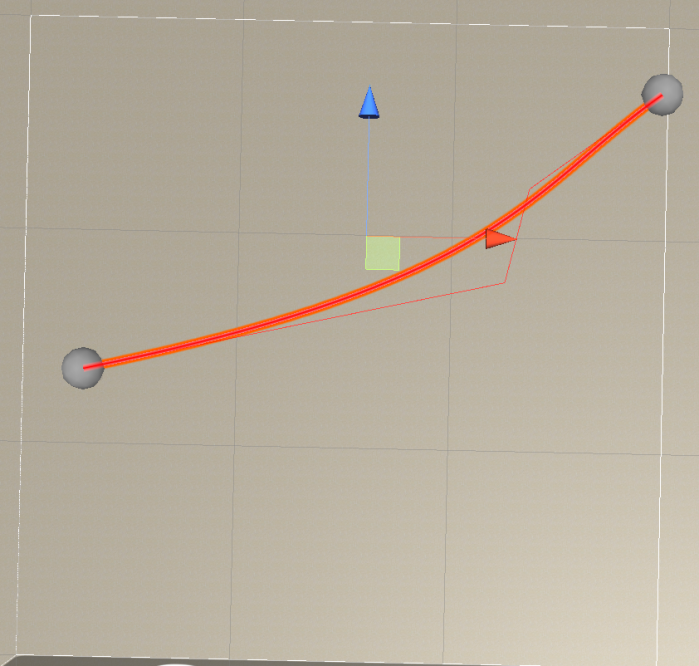
Realisiert wird dies, indem zunächst mit
Poisson Disk Sampling Punkte auf einer Fläche verteilt werden.
Danach werden pro Punkt die benachbarte Punkte gesucht und mit dem originalen Punkt
verbunden. Um eine Straße zwischen den zwei Punkten A und B zu generieren,
wird Bézier Curves mit zwei Ankerpunkten verwendet. Die Ankerpunkten
werden dabei zufällig im Umkreis der Linie zwischen den Punkten A und B gesetzt.
Anfang und Ende jeder Strecke müssen als nächstes mit einer Textur der Kreuzung nahtlos
angeschlossen werden. Abschließend werden Metainformationen für die Autos auf den
Strecken verteilt.
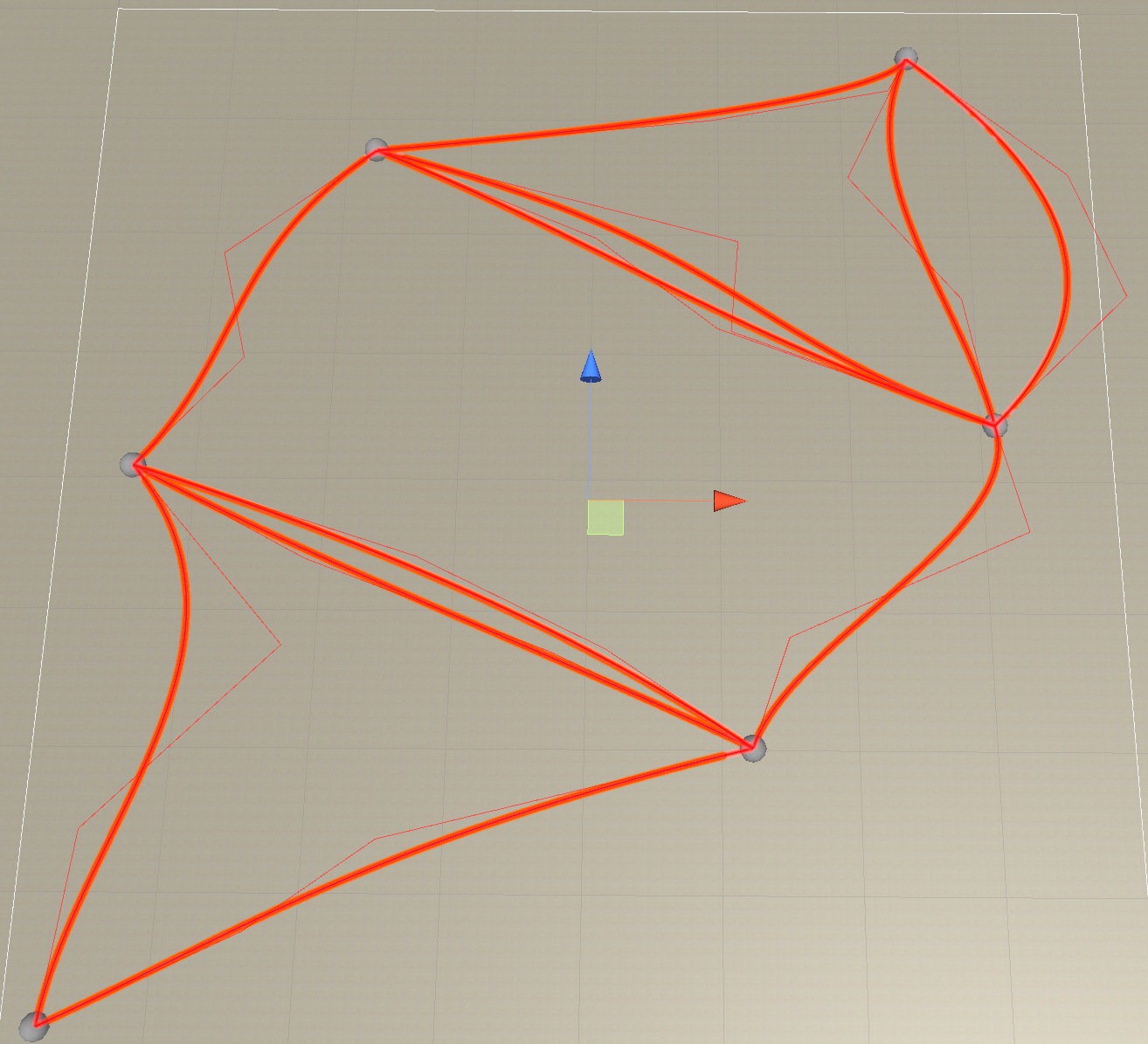
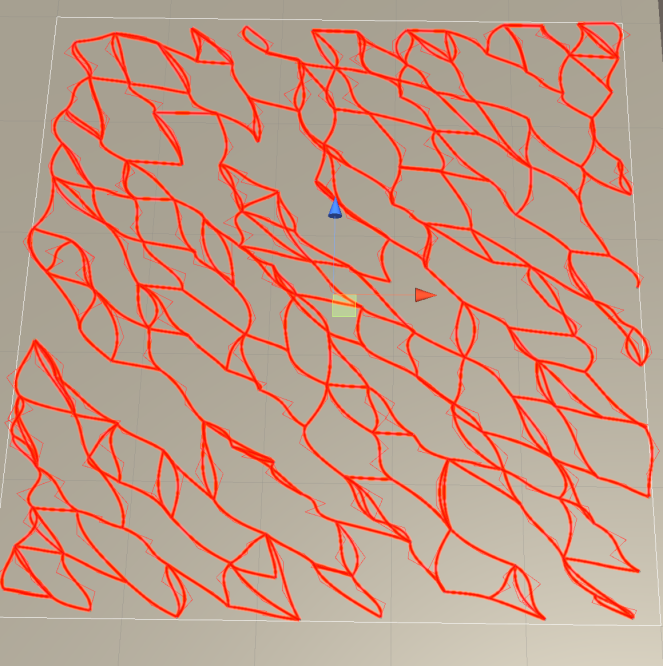
Um möglichst universell einsetzbar zu sein, kann der Simulator
Streckensysteme unterschiedlicher Größe generieren (Abbildungen links).
Eins zu Eins Simulation
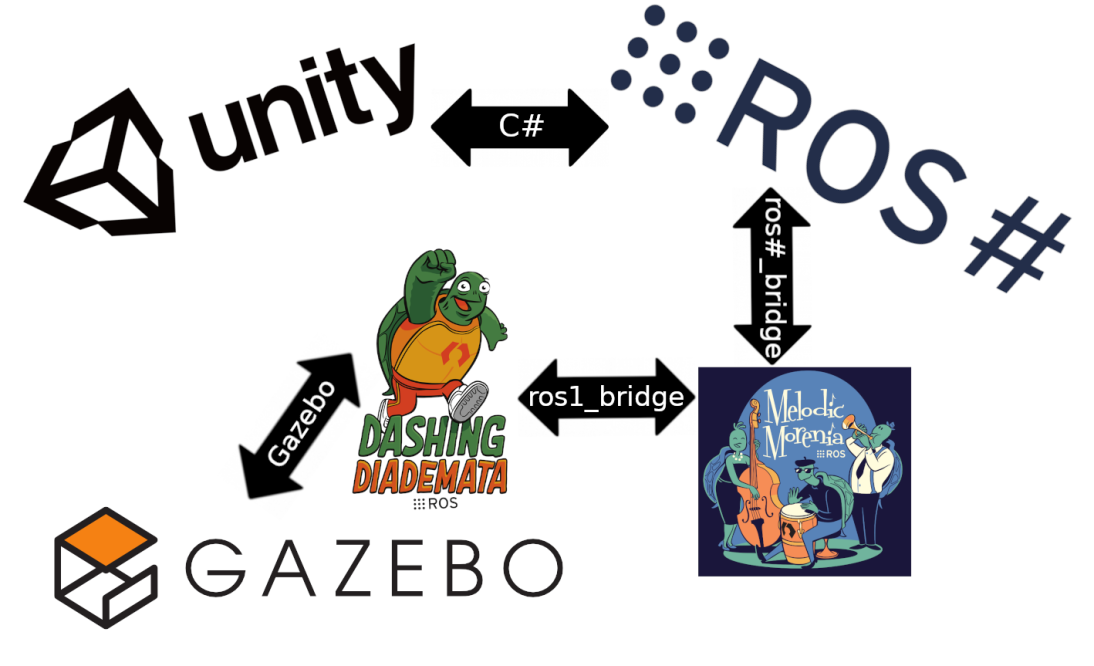
Ein weiteres Ziel war, eine eins zu eins Simulation umzusetzen. Da die Kommunikation im
Projekt über ROS2 Dashing abläuft und der Donkey Car Simulator nur über Unity
ansprechbar ist, musste eine Verbindung von ROS2 Dashing nach Unity aufgebaut werden.
Dazu wurde zuerst eine Verbindung von Unity zu ROS1 Melodic hergestellt, da diese
bereits von Siemens implementiert wurde. Da nun noch die Verbindung von ROS1 Melodic zu
ROS2 Dashing fehlte, wurde die von ROS2 Dashing mitgebrachte Verbindung zu ROS1 genutzt.
Aufgrund der Corona Pandemie konnte diese Verbindung noch nicht am echten Auto getestet
werden. Mit dem Gazebo Simulator war es jedoch möglich, die Verbindung erfolgreich
testen zu können.
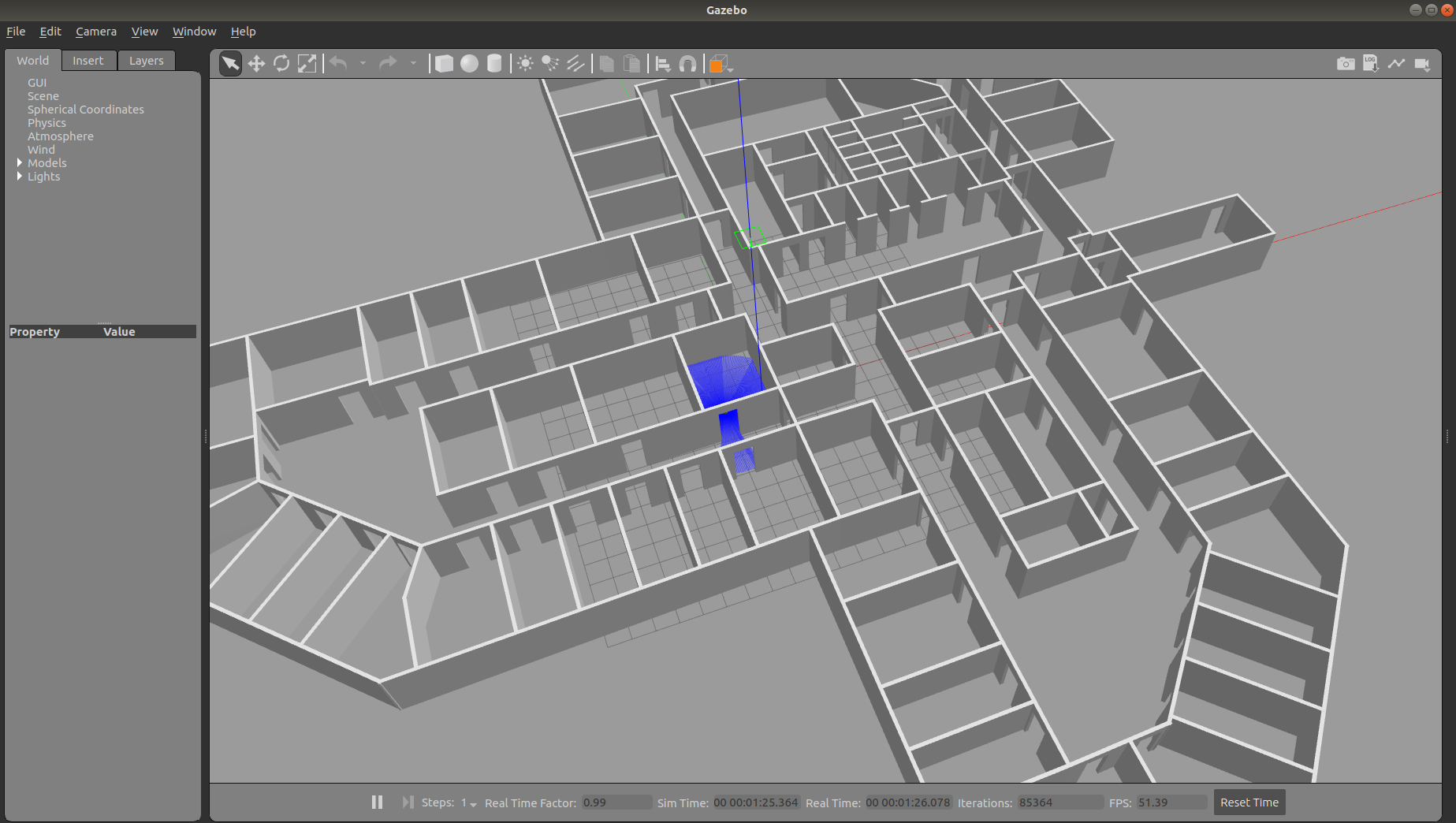
Gazebo Simulation
Die Corona Pandemie hat dazu geführt, dass das DRIVE Auto nicht vor Ort gefahren bzw. getestet werden konnte. Dies hatte negative Auswirkungen auf die Entwicklung der Ortung, da die Ausgaben des LiDARS beispielsweise ausfielen. Durch den Gazebo Simulator wurde allerdings ermöglicht, an die benötigten Daten zu gelangen.Gazebo ist ein Open-Source-Simulator für komplexe Anwendungen der Robotik mit einer sehr akuraten Ignition Physics Engine und integrierter ROS Schnittstelle. Bei korrekter Konfiguration verhält sich das Auto so wie in der Realität.
DonkeyGUI
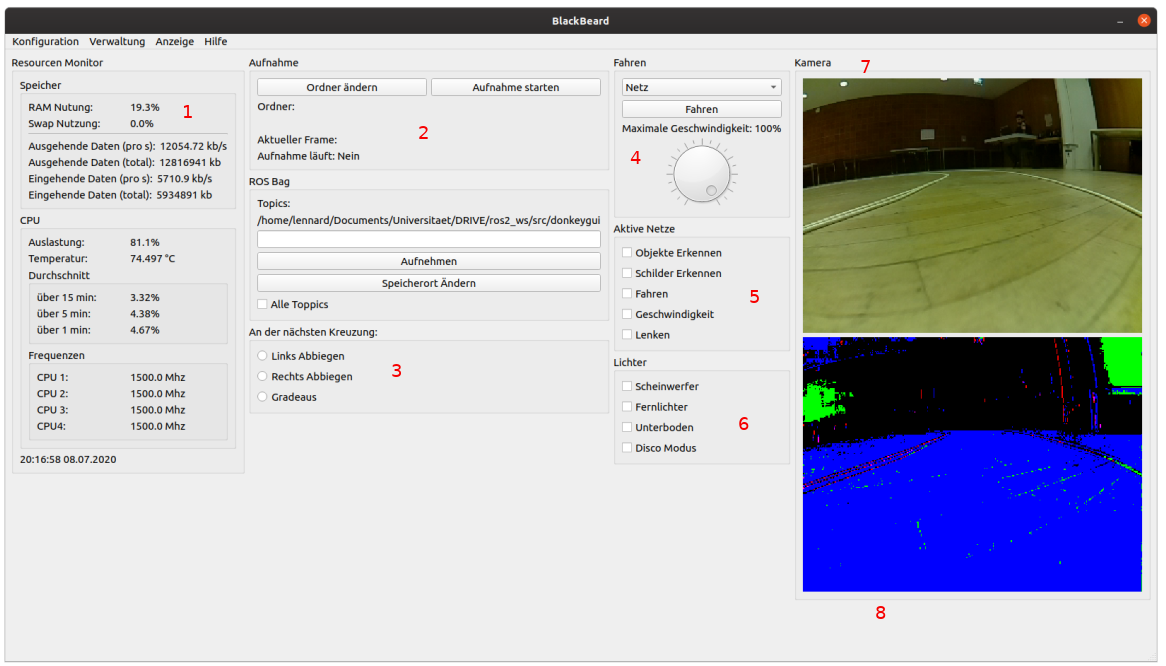
Im Rahmen des Projektes wurde eine DonkeyGUI entwickelt, mit dem Ziel, die wichtigsten
Funktionen des DRIVE Autos schneller zur Verfügung zu stellen und eine vereinfachte
Ressourcenüberwachung zu realisieren.
- Auf der linken Seite sind die Ressourcen des Raspberry Pi's mit ihrer Auslastung aufgelistet. (1)
- In der mittleren Spalte können die vom Auto empfangenen Daten in verschiedenen Formaten aufgenommen werden. (2)
- Außerdem kann man festlegen, welche Kreuzung als nächstes präferiert werden soll. (3)
- In der Spalte rechts sind Optionen zum Fahren des Autos, wo spezifiziert werden kann, ob das Auto manuell (via Tastatur oder Controller) oder durch ein neuronales Netz gesteuert wird. (4)
- Desweiteren kann das aktive Netz umgeschaltet werden, um so das Verhalten des Autos zu beeinflussen. (5)
- Auch die Lichter des Autos können manuell ausgewählt werden. (6)
- Ganz rechts werden die Kameraaufnahmen mit einem Overlay der Objekterkennung des Autos dargestellt. (7)
- Darunter ist das gleiche Bild, jedoch überarbeitet mit einer Kantenerkennung. (8)
Darüber hinaus ist eine Visualisierung der Ortung eingebaut, sowie die Möglichkeit, Prozesse
auf dem Pi sehen und terminieren zu können. Die LCD Pi's können auch mit der DonkeyGUI
angesprochen werden, wodurch ausgewählt werden kann, welches Straßenschild / Ampel angezeigt
werden soll.